2023级答案(B)¶
2024—2025学年第一学期¶
考试科目:数据科学与工程数学基础 任课教师:树扬
姓 名:_ 学 号:_
专 业:_ 班 级:_
该卷纸几乎与2023级快期末时候(2024年12月)不计入分数的期中小测试一致 下面是这次小测试的题目和答案
数据科学与工程数学基础课堂练习¶
题目1¶
给定矩阵A:
(1) 求矩阵A的迹、行秩、行列式
(2) 求A的列空间的一组基
(3) 考虑一个线性映射 \(\Phi:\mathbb{R}^{3}\rightarrow\mathbb{R}^{3}\) 其从标准基 \(\mathcal{B}=\{e_{1},e_{2},e_{3}\}\) (\(e_{i}=(\dots,0,1,0,\dots)^{T}\))到标准基 \(\mathcal{C}=\{e_{1},e_{2},e_{3}\}\) 下的变换矩阵为A,现将 \(\mathcal{B}\) 变换为 \(\tilde{\mathcal{B}}=\left(\begin{bmatrix}1\\ 0\\ 1\end{bmatrix},\begin{bmatrix}0\\ 1\\ 1\end{bmatrix},\begin{bmatrix}1\\ 1\\ 0\end{bmatrix}\right)\),将 \(\mathcal{C}\) 变换为 \(\tilde{\mathcal{C}}=\left(\begin{bmatrix}1\\ 0\\ 1\end{bmatrix},\begin{bmatrix}0\\ 1\\ 1\end{bmatrix},\begin{bmatrix}1\\ 2\\ 2\end{bmatrix}\right)\)。求新的基下的变换矩阵。
解
(1) \(trace(A)=\sum_{i=1}^{3}a_{ii}=5\)
对A进行初等行变换,变换成上三角形式,可得 \(\begin{bmatrix}1&0&0\\ 0&1&0\\ 0&0&1\end{bmatrix}\),\(rank(A)=3\)
\(|A|=(1\times1\times3)+(2\times1\times1)+(1\times2\times2)-(1\times1\times1)-(2\times2\times3)-(1\times1\times2)=-6\)
(也可以由行列式不为0,得到A满秩,所以 \(rank(A)=3\))
(2) 矩阵A的列空间是由其列向量张成的向量空间,且矩阵A秩为3:
(3) 变换矩阵S:联系新基底 \(\tilde{\mathcal{B}}\) 下坐标和标准基 \(\mathcal{B}\)(旧基底)下坐标的线性映射,其列向量为 \(\tilde{\mathcal{B}}\) 的基向量 (\(\mathcal{B}S=\tilde{\mathcal{B}}\))
变换矩阵T:把坐标从用标准基 \(\mathcal{C}\) 表示到用新基 \(\tilde{\mathcal{C}}\) 表示的线性映射,其列向量为 \(\tilde{\mathcal{C}}\) 的基向量 (\(\mathcal{C}T=\tilde{\mathcal{C}}\))
\(A=A_{\Phi}\) 是 \(\mathcal{B}\) 到 \(\mathcal{C}\) 的变换矩阵: \(\Phi(\mathcal{B})=\mathcal{C}A_{\Phi}\)
现在求 \(\tilde{\mathcal{B}}\) 到 \(\tilde{\mathcal{C}}\) 的变换矩阵 \(\tilde{A}_{\Phi}\)
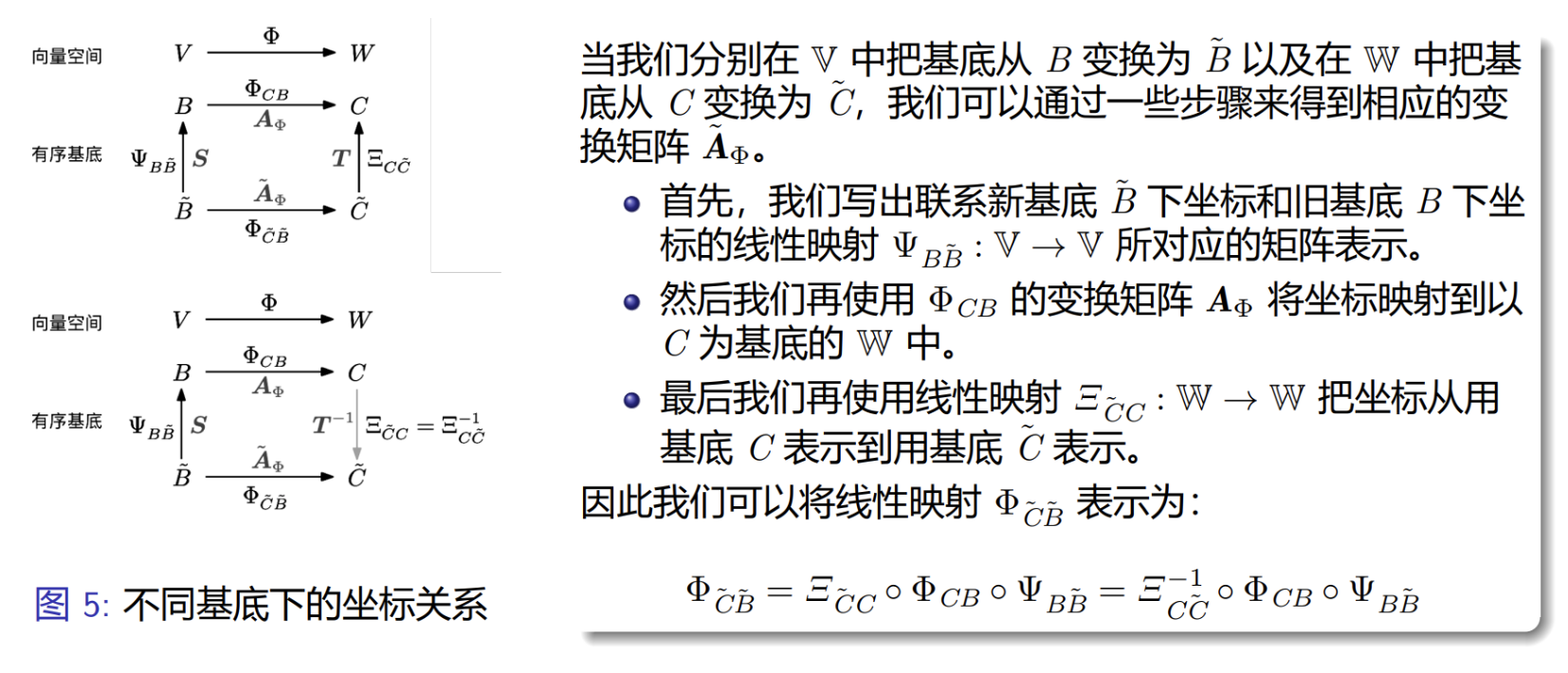
计算 \(\tilde{A}_{\Phi}=T^{-1}A_{\Phi}S\)
因此,新的变换矩阵 \(\tilde{A}_{\Phi}\) 为:
(理解lec4例10)
题目2¶
(1) 给定矩阵P:证明这是一个投影矩阵
(2) 已知 \(\mathbb{R}^{3}\) 中的子空间
和向量 \(x=\begin{bmatrix}6\\ 0\\ 0\end{bmatrix}\),确定投影到以 \(U\) 为基的子空间 \(U\) 上的坐标 \(\lambda\)、投影点 \(\pi_{U}(x)\) 和投影矩阵 \(P_{\pi}\)。
解
(1) 矩阵P是投影矩阵当且仅当满足 \(P^{2}=P\)。经过矩阵计算可以得到 \(P^{2}=P\),所以P是投影矩阵。
(2) \(B^{T}(x-\pi_{U}(x))=0\)(除去投影分量的部分与子空间正交),又有 \(\pi_{U}(x)=B\lambda\)(投影分量可以由其所在子空间的基向量线性表出,\(\lambda\) 是对应坐标),所以有 \(B^{T}x=B^{T}B\lambda\),求得坐标
投影点 \(\pi_{U}(x)=B\lambda=(4,2,2)^{T}\)
投影矩阵 \(P_{\pi}\) 应该满足 \(P_{\pi}x=\pi_{U}(x)\),所以有 \((B^{T}B)^{-1}B^{T}x=\lambda\)(B是一组基,必定列满秩,所以 \(B^{T}B\) 必定可逆),有 \(B(B^{T}B)^{-1}B^{T}x=B\lambda=\pi_{U}(x)\)
题目3¶
给定矩阵B:
(1) 求矩阵B的 \(l_{1}\) 范数和2范数(算子范数)
(2) 证明算子范数 \(||\cdot||\) 满足相容性条件(若矩阵范数 \(||\cdot||\) 满足:\(||AB||\le||A||||B||\),对任意 \(A\in\mathbb{R}^{m\times p}, B\in\mathbb{R}^{p\times n}\),则称矩阵范数满足相容性条件。)
解
(1) \(||B||_{l_{1}}=\sum_{i=1}^{m}\sum_{j=1}^{n}|b_{ij}|=6\),\(||B||_{2}=\sqrt{\lambda_{max}(B^{T}B)}=3\)
(注意区分 \(l_{1}\) 范数和1范数(算子范数),\(l_{2}\) 范数(或称为F范数)和2范数(算子范数))
(2) 证明
lec 6 中的定理7:算子范数都满足相容性条件。
设矩阵范数 \(||\cdot||\) 是由向量范数 \(||\cdot||_{v}\) 诱导的算子范数,
\(A\in\mathbb{R}^{m\times p},B\in\mathbb{R}^{p\times n},x\in\mathbb{R}^{n}\),则:
(证明中运用的性质和定义可以在lec6中找到)
题目4¶
给定矩阵C:
(1) LU分解
(2) QR分解
(3) \(b=(1,2,3)^{T}\),求解线性方程 \(Cx=b\)
解
(1)
(2)
(LU分解、QR分解以及后面的SVD分解的具体步骤可以参考作业3答案的最后手写部分)
(3) 直接利用高斯消元法求解或者利用LU分解(\(Ly=b, Ux=y\),参考作业3习题4答案)都可以,求得解为 \((0,2,1)^{T}\)。
题目5¶
给定矩阵C:
(1) 对矩阵进行奇异值分解
(2) 计算广义逆 \(C^{+}\)
(3) 求最小二乘问题,\(\min_{x}||Cx-b||_{2}\),其中 \(b=(2,3,2)^{T}\)
解
(1)
(奇异值分解方法可以参考作业3答案最后补充部分,有详细步骤)
(2) 可以通过SVD方法:\(C^{+}=V\Sigma^{+}U^{T}\),其中 \(\Sigma^{+}\) 为奇异值取倒数后转置;或者由该矩阵列满秩,得到 \(C^{+}=(C^{T}C)^{-1}C^{T}\),结果为:
(3) 利用广义逆 \(C^{+}\),最小二乘解为:
或者其他求解方法(QR, SVD, 参考lec14),本题为方程组有且仅有唯一解的特例,还可以直接求解。
题目6¶
(1) 设函数 \(f:\mathbb{R}^{n}\rightarrow\mathbb{R}^{n}\) 定义为:\(f(x)=Ax+b\),\(A\in\mathbb{R}^{n\times n}, b\in\mathbb{R}^{n}\),求 \(\frac{\partial f^{T}}{\partial x}\)
(2) 设函数 \(g:\mathbb{R}^{n}\rightarrow\mathbb{R}\) 定义为:\(g(x)=(Ax+b)^{T}C(Ax+b)\),其中 \(A,C\in\mathbb{R}^{n\times n}, b\in\mathbb{R}^{n}\),求 \(\frac{\partial g}{\partial x}\)
解
(1) \(f\) 是一个向量值函数,可以利用 Jacobian 矩阵求导,解析为了区分行列,将 \(f\) 记作 \(f:\mathbb{R}^{n}\rightarrow\mathbb{R}^{m}, n=m, A\in\mathbb{R}^{m\times n}\)
所以 \(\frac{\partial f^{T}}{\partial x}=A^{T}\)(理解lec 15.3.1向量值函数的梯度相关内容)
(2) 令 \(f(x)=Ax+b\),\(g(x)=f^{T}Cf\)
再由链式法则 \(\frac{\partial g}{\partial x}=\frac{\partial f^{T}}{\partial x}\frac{\partial g}{\partial f}\)
其中 \(\frac{\partial f^{T}}{\partial x}\) 即第一小问结论,\(\frac{\partial f^{T}}{\partial x}=A^{T}\)
可以利用书上例题(lec15例9)的结论得到 \(\frac{\partial g}{\partial f}=(C+C^{T})f\)
最后得到结果: