实验报告¶
上机实践名称:二叉搜索树
上机实践编号:No.8
上机实践日期:2023年4月20日
目的¶
1.熟悉算法设计的基本思想
2.掌握二叉树搜索的基本思想,并且能够分析算法性能
内容与设计思想¶
- 编程实现二叉搜索树,能根据给定字符串(50,20,80,null,null,60,90,null,null,null,100)构建对应二叉搜索树,实现二叉搜索树的各种操作,包括先序遍历、取最小值、取最大值、搜索节点、获取前驱节点以及获取后驱节点。
- 根据二叉搜索树的中序遍历,输出二叉搜索树的先序和后序遍历结果。
- 选择合适的数据规模,计算二叉搜索树在不同数据量下查询操作的所需时间。
- 思考题:对比二叉搜索树、顺序访问和散列表的性能。
使用环境¶
推荐使用C/C++集成编译环境。
实验过程¶
- 写出算法的源代码;
- 以合适的图来表示你的实验数据
二叉搜索树的定义和性质
一棵二叉搜索树是以二叉树的形式来组织的,可以用类似于链表的方式来组织,它的每个结点一般包含的信息包括:
struct Node {
Node *left;
Node *right;
int val;
};
二叉搜索树需要满足以下的性质:1.左子树非空时, 左子树所有结点的 key, 均小于根结点的 key;2.右子树非空时, 右子树所有结点的 key, 均大于根结点的 key;3.任意结点的左右子树也是一颗二叉搜索树;4.没有结点值相等的.
二叉搜索树的三种经典的遍历方式
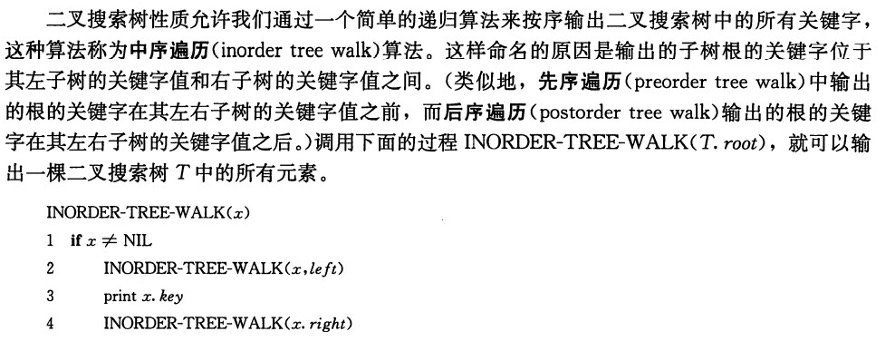
三种遍历的不同点在于打印根节点值,递归遍历左子树和右子树的顺序不同。在本次实验中,将50,20,80,null,null,60,90,null,null,null,100插入二叉搜索树后的三种遍历结果如下图所示:
二叉搜索树的最小值
根据BST的性质,左子树的值均小于根,因此搜索最小值时只需要不停地沿左子树递归即可,找到最后一个不为NULL的结点便是二叉搜索树的最小值。
二叉搜索树的最大值
根据BST的性质,右子树的值均大于根,因此搜索最大值时只需要不停地沿右子树递归即可,找到最后一个不为NULL的结点便是二叉搜索树的最大值。
二叉搜索树的结点搜索
这其实是一个类似于二分查找的操作,因为BST的左子树值均小于根结点的值而右子树的值均大于根节点的值,所以为了搜索对应的结点,我们从整个BST的根节点开始,不断迭代,如果当前结点值为目标值,则直接返回,如果当前节点值小于目标值,则去右树中迭代寻找,大于目标值则去左树迭代寻找。
BST的层数越少, 查找时间越少, 但是当数据增多时BST并不能保证树的高度一直是最优的, 甚至在极端情况下 : 一个已经有序的数列会导致BST退化成一个单链表.
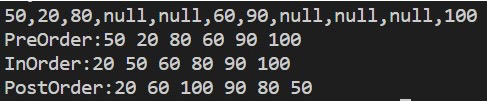
二叉搜索树获得前驱结点
一个二叉树中序遍历中某个节点的前一个节点叫该节点的前驱节点。这个还比较有意思,我结合的是BST的性质,而不是利用类似深度优先搜索的方式去搜索。若该节点存在左子树,则其前驱节点为左子树最右边的节点;若该节点不存在左子树,则利用parent指针向父节点找,若满足该节点是其父节点的右节点,则该父节点为当前节点的前驱节点,若不满足则更新父节点为祖父节点,当前节点更新为其父节点,直到满足条件或者父节点为空,为空表示到达根节点依旧没有找到。这个前面一种情况是比较好理解的,但是后面一种情况呢?通过画图找规律、归纳,我发现如果x没有左孩子,则x有以下两种可能:1. x是一个"右孩子",则x的前驱结点便是它的父结点;2. x是一个"左孩子",则查找x的最低的父结点,并且该父结点要具有右孩子,找到的这个"最低的父结点"就是x的前驱结点。(要找前驱元素,肯定是找一个有右孩子的父节点,并且这个父节点的右孩子中一定能找到当前节点.)
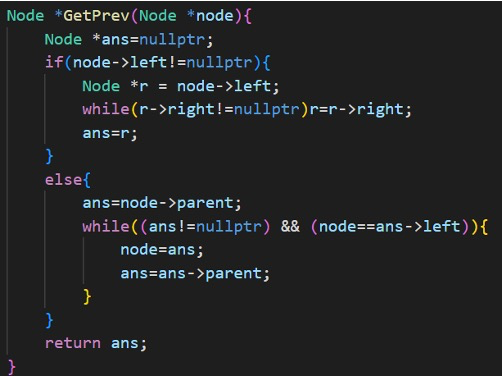
二叉搜索树获得后驱结点
一个二叉树中序遍历中某个节点的后一个节点叫该节点的后驱节点。若该节点存在右子树,则其后继节点为右子树最左边的节点;若该节点不存在右子树,则利用parent指针向父节点找,若满足该节点是其父节点的左节点,则该父节点为当前节点的后继节点,若不满足则更新父节点为祖父节点,当前节点更新为其父节点,直到满足条件或者父亲节点为空,为空表示到达根节点依旧没有找到。这个的理解类似于上面对前驱结点的理解。
总结¶
对上机实践结果进行分析,问题回答,上机的心得体会及改进意见。
本次实验的难度不算大,整体来说比较基础,然后我在10^3-10^6插入数据规模之下,每个数据规模分别查询10%,100%,1000%的数,得到的运行时间如下图所示:
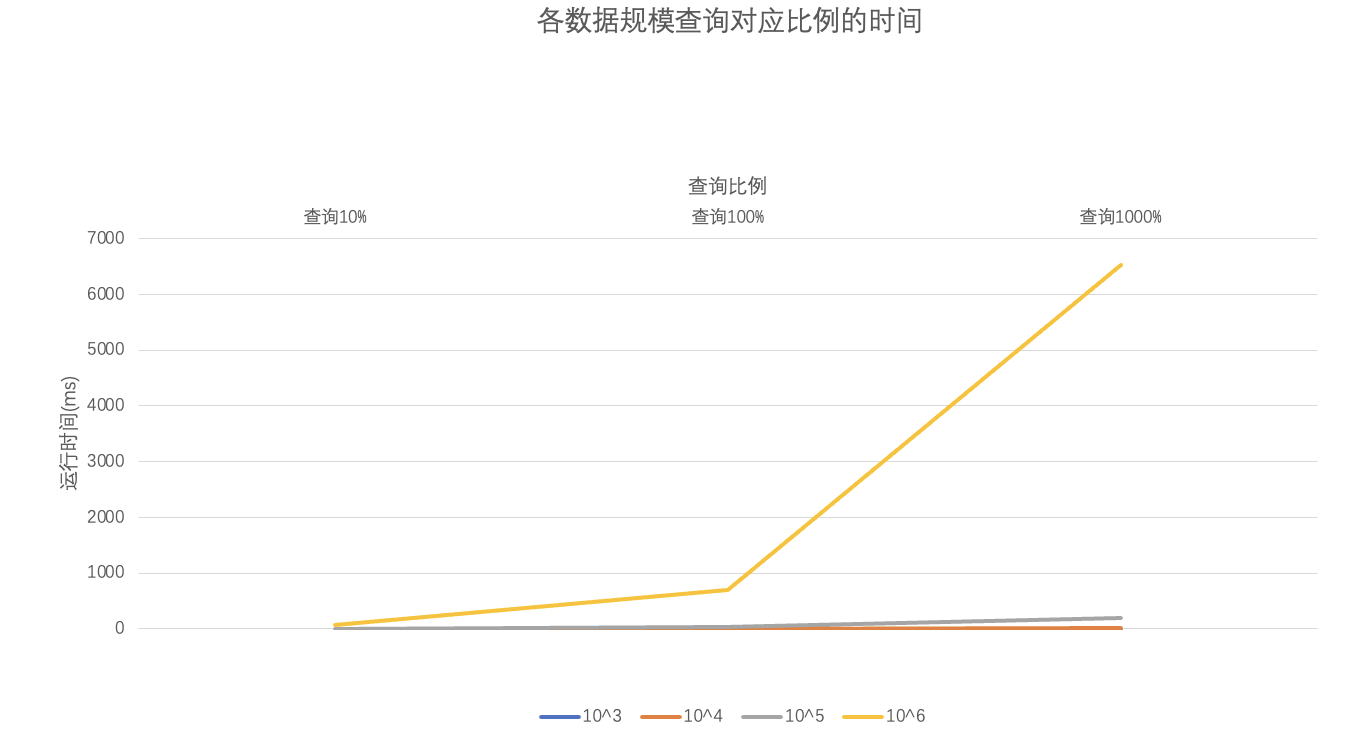
| 查询10% | 查询100% | 查询1000% | |
|---|---|---|---|
| 10^3 | 0 | 0 | 0 |
| 10^4 | 0 | 1 | 8 |
| 10^5 | 2 | 28 | 184 |
| 10^6 | 69 | 703 | 6521 |
可以看到随着数据规模的扩大,二叉搜索树的查询时间越来越大。究其本质,还在于数据规模扩大时二叉树的深度明显增大,这样在搜索结点时的迭代次数就会对应地变大,降低了查询的效率。比较引起我们重视的是普通的BST深度的增大是不可控制的,对于最差的情况甚至会退化为一个单链表,日后要学习的红黑树、AVL树等平衡二叉搜索树的本质在于通过适当的左旋、右旋等操作使树的深度被控制在对数范围内,大幅提高了运行效率。
思考题:对比二叉搜索树、顺序访问和散列表的性能。
二叉搜索树:在最好情况下插入、查询和删除操作的时间复杂度都是对数级的Θ(lgn).二叉搜索树各个操作的时间复杂度取决于树的深度,如果没有红黑树这样的优化措施,不同的插入顺序可能会得到完全不同形态的树状结构——对于一个已经有序的序列的插入会退化成一个单链表。但是二叉搜索树最好的特征是有序性,我们不需要像顺序访问和散列表这种无序表一样先把数据取出来,再排序才能得到有序的序列。
顺序访问:插入的时间复杂度是Θ(1) ,查询和删除的时间复杂度是线性的,即Θ(n)。对于新元素的插入,顺序访问只需要把新元素放到这个数据结构的末端就行了,常数级的复杂度效率很高。由于查询和删除操作都需要一个一个地从头往后找,直到找到对应元素,所以这两种操作的时间复杂度是Θ(n),效率过低,应用价值比较小。
散列表:在理想情况下,插入、查询和删除操作的时间复杂度都是常数级Θ(1).在实际运用过程中可能会遇到哈希冲突这样的问题,使得散列表并不能像预期的那样总是Θ(1)级别复杂度。并且我们在实际使用散列表的过程中,要恰当地构造散列函数,使得数据尽可能均匀地分布于整个表中;与此同时,我们还要确保装载因子维持在一个理想的情况下——太大效率会显著降低;太小则空间大量浪费。
三种不同的数据结构有它们各自的特点,根据我们的需求进行选择,相信我们能最大化它们的价值!